Arduinoとは
Arduinoは、AVRマイコン、単純な入出力を備えた基板と Processing/Wiring 系の言語と統合開発環境から構成されるシステムです。
Arduino はコンピュータと接続せずにスタンドアロンとして動作させることが可能であり、手軽にインタラクティブなデバイス開発にも使え、コンピュータのソフトウェアと組み合せることでそちらからリアルタイムに制御することもできます。Adobe Flash、Processing、Max/MSP、Pure Data、SuperColliderはArduinoを制御するために使用することが可能です。
Arduinoボードは、2011年2月時点で約15万台の販売実績があります。またArduinoプロジェクトは2006年度のアルス・エレクトロニカ賞において名誉言及を受けています。
HP : http://arduino.cc/
オープンソースハードウェア
Arduinoは、組み立て済みの基板を購入することもできますが、ハードウェア設計情報のEAGLEファイルは無料で公開されており、誰でも自分の手で Arduino を組み立てることができます。このようなデバイスをオープンソースハードウェアと言います。
オープンソースハードウェアは比較的新しい概念であるため、またソフトウェアとハードウェアの設計上の違いもあって、オープンソースハードウェアについての共通認識が出来上がっておらず、無料で入手できるハードウェアとの誤解もありますが、ハードウェアの概要・設計・実装などの情報をフリーなライセンスで提供することを意味する場合が多いです。
オープンソースハードウェアの実例
RepRap.org
RepRap from Adrian Bowyer on Vimeo.
RepRap は、プラスチックの物体を作成することができるオープンソースハードウェアのデスクトップ3Dプリンタ です。RepRap に使われている多くの部品はプラスチックで作られており、RepRap 自身で作成することができる自己複製機械であるという点がユニークです。
http://reprap.org/wiki/WebHome
Fab@Home
Fab@Home はデジタルファブリケーションのためのオープンソースハードウェアであり、粉末や液体状の素材を何層にも積み上げていくことで立体物を作りあげていくシステムです。扱える素材も幅広くチョコレートなども造形可能であるため、大規模な食品会社ではない個人が材料さえあればユニークな創作をDIYすることが可能となっています。
Aruduinoでの電子工作、プログラミング
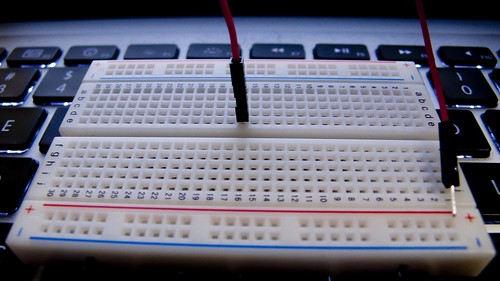
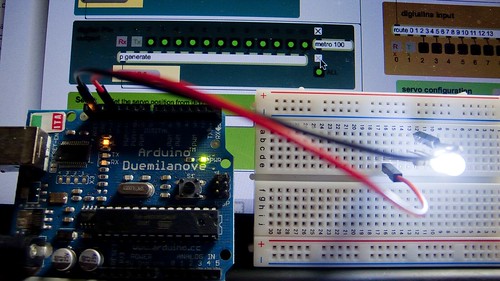
Arduinoでは一般的にブレッドボードと呼ばれるハンダ付けによる配線をせずに各種電子部品やジャンパ線を差し込むだけで電子回路を組むことの出来る基盤を利用して制作が行われます。
Arduinoではソフトウェア側のプログラムのことをスケッチと呼びます。Arduinoの統合開発環境はLinuxでもWindowsでもMacでもクロスプラットフォームで使用可能なJavaアプリケーションであり、エディタ、コンパイラ、基板へのファームウェア転送機能などを含んでいます。その内部ではC言語のコンパイラgccやアップロードプログラムavrdudeが使用されています。
開発環境はソフトウェア開発に不慣れなアーティストでも容易にプログラミングできるよう設計されており、 Wiringというプログラミング言語から派生した言語で書く必要があり、C言語/C++風の構文で制限の多い基板向けに最適化されています。
ブレッドボードは、2000年前後までは鉛を含まないハンダの技術が遅れていたこともあり、人体に有害な重金属問題を回避できることや、パーツ交換が容易なので回路変更が自在にでき、試作や実験・教育用として広く用いらるようになっています。
ブレッドボードで設計できる回路には限度もあり、簡単な構成である必要がある他、高周波回路、500mA以上の大電流を流す回路にも向かないなどの限界があります。
LEDを光らせる簡単なプログラム
void setup() {
// initialize the digital pin as an output.
// Pin 13 has an LED connected on most Arduino boards:
pinMode(13, OUTPUT);
}
void loop() {
digitalWrite(13, HIGH); // set the LED on
delay(1000); // wait for a second
digitalWrite(13, LOW); // set the LED off
delay(1000); // wait for a second
}
LED
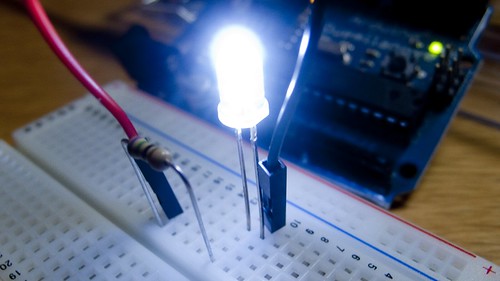
LED(エルイーディー: Light Emitting Diode)は発光ダイオードとも呼ばれ、順方向に電圧を加えた際に発光する半導体素子のことです。寿命が白熱電球に比べてかなり長く、蛍光灯や電球に置き換わる光源としても大いに期待されています。LEDには極性があるため、配線には注意が必要です。短いリードはカソードと呼ばれグランド側に、長いリードはアノードと呼ばれておりプラス側に配線する必要があります。
抵抗
高輝度タイプのLEDや白色LEDは定格電圧3.5V程度、定格電流20mA程度が多いです。 Arduinoの指定したピンからそのまま5Vが出力された場合、電圧に耐えきれずLEDが壊れてしまいます。この場合に回路の間に抵抗を挟むことで、電気の流れを抑えることができます。
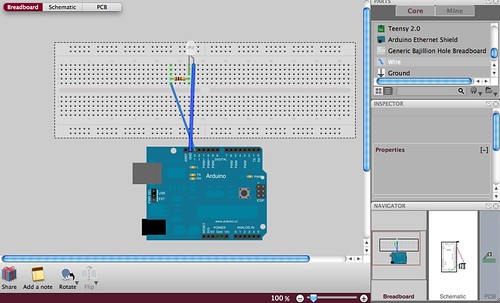
Fritzing
arduinoの回路をヴィジュアライズするために便利なFritzingというソフトがあります。
Maxuino
ArduinoはMax/MSPから制御することが可能です。Maxユーザーは使い慣れたMaxプログラミングの技術を使って音楽や映像のみならずLEDを光らせたり、モーターを動かすことが可能になります。
MaxでArduinoを制御するためには上記サイトからmaxuinoをダウンロードし、サンプルのパッチを開いてください。以下のソースもArduino側にuploadする必要があります。
/* Copyright (C) 2006-2008 Hans-Christoph Steiner. All rights reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. See file LICENSE.txt for further informations on licensing terms. formatted using the GNU C formatting and indenting */ /* * TODO: use Program Control to load stored profiles from EEPROM */ #include#include /*============================================================================== * GLOBAL VARIABLES *============================================================================*/ /* analog inputs */ int analogInputsToReport = 0; // bitwise array to store pin reporting /* digital input ports */ byte reportPINs[TOTAL_PORTS]; // 1 = report this port, 0 = silence byte previousPINs[TOTAL_PORTS]; // previous 8 bits sent /* pins configuration */ byte pinConfig[TOTAL_PINS]; // configuration of every pin byte portConfigInputs[TOTAL_PORTS]; // each bit: 1 = pin in INPUT, 0 = anything else int pinState[TOTAL_PINS]; // any value that has been written /* timer variables */ unsigned long currentMillis; // store the current value from millis() unsigned long previousMillis; // for comparison with currentMillis int samplingInterval = 19; // how often to run the main loop (in ms) Servo servos[MAX_SERVOS]; /*============================================================================== * FUNCTIONS *============================================================================*/ void outputPort(byte portNumber, byte portValue, byte forceSend) { // pins not configured as INPUT are cleared to zeros portValue = portValue & portConfigInputs[portNumber]; // only send if the value is different than previously sent if(forceSend || previousPINs[portNumber] != portValue) { Firmata.sendDigitalPort(portNumber, portValue); previousPINs[portNumber] = portValue; } } /* ----------------------------------------------------------------------------- * check all the active digital inputs for change of state, then add any events * to the Serial output queue using Serial.print() */ void checkDigitalInputs(void) { /* Using non-looping code allows constants to be given to readPort(). * The compiler will apply substantial optimizations if the inputs * to readPort() are compile-time constants. */ if (TOTAL_PORTS > 0 && reportPINs[0]) outputPort(0, readPort(0, portConfigInputs[0]), false); if (TOTAL_PORTS > 1 && reportPINs[1]) outputPort(1, readPort(1, portConfigInputs[1]), false); if (TOTAL_PORTS > 2 && reportPINs[2]) outputPort(2, readPort(2, portConfigInputs[2]), false); if (TOTAL_PORTS > 3 && reportPINs[3]) outputPort(3, readPort(3, portConfigInputs[3]), false); if (TOTAL_PORTS > 4 && reportPINs[4]) outputPort(4, readPort(4, portConfigInputs[4]), false); if (TOTAL_PORTS > 5 && reportPINs[5]) outputPort(5, readPort(5, portConfigInputs[5]), false); if (TOTAL_PORTS > 6 && reportPINs[6]) outputPort(6, readPort(6, portConfigInputs[6]), false); if (TOTAL_PORTS > 7 && reportPINs[7]) outputPort(7, readPort(7, portConfigInputs[7]), false); if (TOTAL_PORTS > 8 && reportPINs[8]) outputPort(8, readPort(8, portConfigInputs[8]), false); if (TOTAL_PORTS > 9 && reportPINs[9]) outputPort(9, readPort(9, portConfigInputs[9]), false); if (TOTAL_PORTS > 10 && reportPINs[10]) outputPort(10, readPort(10, portConfigInputs[10]), false); if (TOTAL_PORTS > 11 && reportPINs[11]) outputPort(11, readPort(11, portConfigInputs[11]), false); if (TOTAL_PORTS > 12 && reportPINs[12]) outputPort(12, readPort(12, portConfigInputs[12]), false); if (TOTAL_PORTS > 13 && reportPINs[13]) outputPort(13, readPort(13, portConfigInputs[13]), false); if (TOTAL_PORTS > 14 && reportPINs[14]) outputPort(14, readPort(14, portConfigInputs[14]), false); if (TOTAL_PORTS > 15 && reportPINs[15]) outputPort(15, readPort(15, portConfigInputs[15]), false); } // ----------------------------------------------------------------------------- /* sets the pin mode to the correct state and sets the relevant bits in the * two bit-arrays that track Digital I/O and PWM status */ void setPinModeCallback(byte pin, int mode) { if (IS_PIN_SERVO(pin) && mode != SERVO && servos[PIN_TO_SERVO(pin)].attached()) { servos[PIN_TO_SERVO(pin)].detach(); } if (IS_PIN_ANALOG(pin)) { reportAnalogCallback(PIN_TO_ANALOG(pin), mode == ANALOG ? 1 : 0); // turn on/off reporting } if (IS_PIN_DIGITAL(pin)) { if (mode == INPUT) { portConfigInputs[pin/8] |= (1 << (pin & 7)); } else { portConfigInputs[pin/8] &= ~(1 << (pin & 7)); } } pinState[pin] = 0; switch(mode) { case ANALOG: if (IS_PIN_ANALOG(pin)) { if (IS_PIN_DIGITAL(pin)) { pinMode(PIN_TO_DIGITAL(pin), INPUT); // disable output driver digitalWrite(PIN_TO_DIGITAL(pin), LOW); // disable internal pull-ups } pinConfig[pin] = ANALOG; } break; case INPUT: if (IS_PIN_DIGITAL(pin)) { pinMode(PIN_TO_DIGITAL(pin), INPUT); // disable output driver digitalWrite(PIN_TO_DIGITAL(pin), LOW); // disable internal pull-ups pinConfig[pin] = INPUT; } break; case OUTPUT: if (IS_PIN_DIGITAL(pin)) { digitalWrite(PIN_TO_DIGITAL(pin), LOW); // disable PWM pinMode(PIN_TO_DIGITAL(pin), OUTPUT); pinConfig[pin] = OUTPUT; } break; case PWM: if (IS_PIN_PWM(pin)) { pinMode(PIN_TO_PWM(pin), OUTPUT); analogWrite(PIN_TO_PWM(pin), 0); pinConfig[pin] = PWM; } break; case SERVO: if (IS_PIN_SERVO(pin)) { pinConfig[pin] = SERVO; if (!servos[PIN_TO_SERVO(pin)].attached()) { servos[PIN_TO_SERVO(pin)].attach(PIN_TO_DIGITAL(pin)); } else { Firmata.sendString("Servo only on pins from 2 to 13"); } } break; case I2C: pinConfig[pin] = mode; Firmata.sendString("I2C mode not yet supported"); break; default: Firmata.sendString("Unknown pin mode"); // TODO: put error msgs in EEPROM } // TODO: save status to EEPROM here, if changed } void analogWriteCallback(byte pin, int value) { if (pin < TOTAL_PINS) { switch(pinConfig[pin]) { case SERVO: if (IS_PIN_SERVO(pin)) servos[PIN_TO_SERVO(pin)].write(value); pinState[pin] = value; break; case PWM: if (IS_PIN_PWM(pin)) analogWrite(PIN_TO_PWM(pin), value); pinState[pin] = value; break; } } } void digitalWriteCallback(byte port, int value) { byte pin, lastPin, mask=1, pinWriteMask=0; if (port < TOTAL_PORTS) { // create a mask of the pins on this port that are writable. lastPin = port*8+8; if (lastPin > TOTAL_PINS) lastPin = TOTAL_PINS; for (pin=port*8; pin < lastPin; pin++) { // do not disturb non-digital pins (eg, Rx & Tx) if (IS_PIN_DIGITAL(pin)) { // only write to OUTPUT and INPUT (enables pullup) // do not touch pins in PWM, ANALOG, SERVO or other modes if (pinConfig[pin] == OUTPUT || pinConfig[pin] == INPUT) { pinWriteMask |= mask; pinState[pin] = ((byte)value & mask) ? 1 : 0; } } mask = mask << 1; } writePort(port, (byte)value, pinWriteMask); } } // ----------------------------------------------------------------------------- /* sets bits in a bit array (int) to toggle the reporting of the analogIns */ //void FirmataClass::setAnalogPinReporting(byte pin, byte state) { //} void reportAnalogCallback(byte analogPin, int value) { if (analogPin < TOTAL_ANALOG_PINS) { if(value == 0) { analogInputsToReport = analogInputsToReport &~ (1 << analogPin); } else { analogInputsToReport = analogInputsToReport | (1 << analogPin); } } // TODO: save status to EEPROM here, if changed } void reportDigitalCallback(byte port, int value) { if (port < TOTAL_PORTS) { reportPINs[port] = (byte)value; } // do not disable analog reporting on these 8 pins, to allow some // pins used for digital, others analog. Instead, allow both types // of reporting to be enabled, but check if the pin is configured // as analog when sampling the analog inputs. Likewise, while // scanning digital pins, portConfigInputs will mask off values from any // pins configured as analog } /*============================================================================== * SYSEX-BASED commands *============================================================================*/ void sysexCallback(byte command, byte argc, byte *argv) { switch(command) { case SERVO_CONFIG: if(argc > 4) { // these vars are here for clarity, they'll optimized away by the compiler byte pin = argv[0]; int minPulse = argv[1] + (argv[2] << 7); int maxPulse = argv[3] + (argv[4] << 7); if (IS_PIN_SERVO(pin)) { // servos are pins from 2 to 13, so offset for array if (servos[PIN_TO_SERVO(pin)].attached()) servos[PIN_TO_SERVO(pin)].detach(); servos[PIN_TO_SERVO(pin)].attach(PIN_TO_DIGITAL(pin), minPulse, maxPulse); setPinModeCallback(pin, SERVO); } } break; case SAMPLING_INTERVAL: if (argc > 1) samplingInterval = argv[0] + (argv[1] << 7); else Firmata.sendString("Not enough data"); break; case EXTENDED_ANALOG: if (argc > 1) { int val = argv[1]; if (argc > 2) val |= (argv[2] << 7); if (argc > 3) val |= (argv[3] << 14); analogWriteCallback(argv[0], val); } break; case CAPABILITY_QUERY: Serial.write(START_SYSEX); Serial.write(CAPABILITY_RESPONSE); for (byte pin=0; pin < TOTAL_PINS; pin++) { if (IS_PIN_DIGITAL(pin)) { Serial.write((byte)INPUT); Serial.write(1); Serial.write((byte)OUTPUT); Serial.write(1); } if (IS_PIN_ANALOG(pin)) { Serial.write(ANALOG); Serial.write(10); } if (IS_PIN_PWM(pin)) { Serial.write(PWM); Serial.write(8); } if (IS_PIN_SERVO(pin)) { Serial.write(SERVO); Serial.write(14); } Serial.write(127); } Serial.write(END_SYSEX); break; case PIN_STATE_QUERY: if (argc > 0) { byte pin=argv[0]; Serial.write(START_SYSEX); Serial.write(PIN_STATE_RESPONSE); Serial.write(pin); if (pin < TOTAL_PINS) { Serial.write((byte)pinConfig[pin]); Serial.write((byte)pinState[pin] & 0x7F); if (pinState[pin] & 0xFF80) Serial.write((byte)(pinState[pin] >> 7) & 0x7F); if (pinState[pin] & 0xC000) Serial.write((byte)(pinState[pin] >> 14) & 0x7F); } Serial.write(END_SYSEX); } break; case ANALOG_MAPPING_QUERY: Serial.write(START_SYSEX); Serial.write(ANALOG_MAPPING_RESPONSE); for (byte pin=0; pin < TOTAL_PINS; pin++) { Serial.write(IS_PIN_ANALOG(pin) ? PIN_TO_ANALOG(pin) : 127); } Serial.write(END_SYSEX); break; } } /*============================================================================== * SETUP() *============================================================================*/ void setup() { byte i; Firmata.setFirmwareVersion(2, 2); Firmata.attach(ANALOG_MESSAGE, analogWriteCallback); Firmata.attach(DIGITAL_MESSAGE, digitalWriteCallback); Firmata.attach(REPORT_ANALOG, reportAnalogCallback); Firmata.attach(REPORT_DIGITAL, reportDigitalCallback); Firmata.attach(SET_PIN_MODE, setPinModeCallback); Firmata.attach(START_SYSEX, sysexCallback); // TODO: load state from EEPROM here /* these are initialized to zero by the compiler startup code for (i=0; i < TOTAL_PORTS; i++) { reportPINs[i] = false; portConfigInputs[i] = 0; previousPINs[i] = 0; } */ for (i=0; i < TOTAL_PINS; i++) { if (IS_PIN_ANALOG(i)) { // turns off pullup, configures everything setPinModeCallback(i, ANALOG); } else { // sets the output to 0, configures portConfigInputs setPinModeCallback(i, OUTPUT); } } // by defult, do not report any analog inputs analogInputsToReport = 0; Firmata.begin(57600); /* send digital inputs to set the initial state on the host computer, * since once in the loop(), this firmware will only send on change */ for (i=0; i < TOTAL_PORTS; i++) { outputPort(i, readPort(i, portConfigInputs[i]), true); } } /*============================================================================== * LOOP() *============================================================================*/ void loop() { byte pin, analogPin; /* DIGITALREAD - as fast as possible, check for changes and output them to the * FTDI buffer using Serial.print() */ checkDigitalInputs(); /* SERIALREAD - processing incoming messagse as soon as possible, while still * checking digital inputs. */ while(Firmata.available()) Firmata.processInput(); /* SEND FTDI WRITE BUFFER - make sure that the FTDI buffer doesn't go over * 60 bytes. use a timer to sending an event character every 4 ms to * trigger the buffer to dump. */ currentMillis = millis(); if (currentMillis - previousMillis > samplingInterval) { previousMillis += samplingInterval; /* ANALOGREAD - do all analogReads() at the configured sampling interval */ for(pin=0; pin < TOTAL_PINS; pin++) { if (IS_PIN_ANALOG(pin) && pinConfig[pin] == ANALOG) { analogPin = PIN_TO_ANALOG(pin); if (analogInputsToReport & (1 << analogPin)) { Firmata.sendAnalog(analogPin, analogRead(analogPin)); } } } } }
参考文献 / サイト
2010年版オープンソースハードウェア徹底ガイド ... Make:Japan
http://jp.makezine.com/blog/2010/12/the_ultimate_open_source_hardware_g.html
Arduinoが購入可能なショップ
http://triggerdevice.ocnk.net/
センサー、電子部品が購入可能なショップ
 |
Arduinoをはじめようキット
スイッチサイエンス |
 |
Prototyping Lab ―「作りながら考える」ためのArduino実践レシピ (Make:PROJECTS) 小林 茂 オライリージャパン 2010-05-27 |
 |
Arduinoをはじめよう (Make:PROJECTS) Massimo Banzi 船田 巧 オライリージャパン 2009-03-27 |
 |
電脳Arduinoでちょっと未来を作る (マイコンと電子工作) 神崎 康宏 森 直久 光永 法明 k.kinukawa hatayan 山田 斉 ざがん あみのさん 藤本 直明 エレキジャック編集部 CQ出版 2010-01-01 |